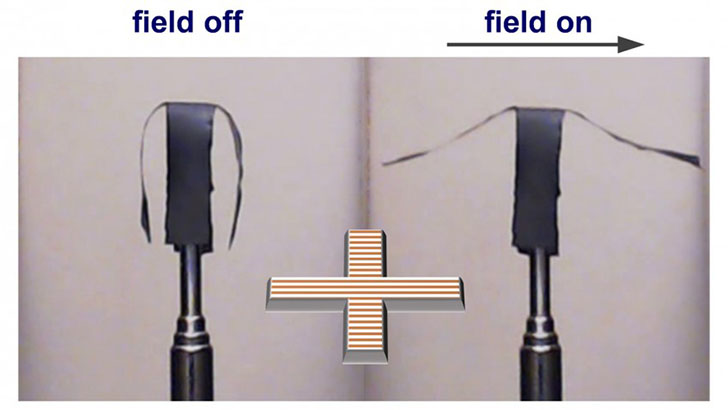
Selective actuation of the side arms of a soft robot in a horizontal uniform magnetic field. Image by researcher Sumeet Mishra of North Carolina State University
Announced December 18, 2015, researchers from North Carolina State University have developed a technique for using chains of magnetic nanoparticles to manipulate elastic polymers in three dimensions, which could be used to remotely control new soft robots.
The process begins by dispersing nanoparticles of magnetite - an iron oxide - into a solvent. A polymer is then dissolved into the mixture, which is poured into a mold to form the desired shape. A magnetic field is then applied, causing the magnetite nanoparticles to arrange themselves into parallel chains. The solution is dried, locking the chains into place, and the finished nanocomposite can be cut, to further refine its shape.
The ability to control the motion of soft robots, coupled with their flexibility, gives them potential applications ranging from biomedical technologies to manufacturing processes. Researchers are interested in using magnetic fields to control the movement of these soft robots because it can be done remotely - the control can be exerted without physically connecting to the polymer - and because magnetic fields are easily obtained from permanent magnets and electromagnets.